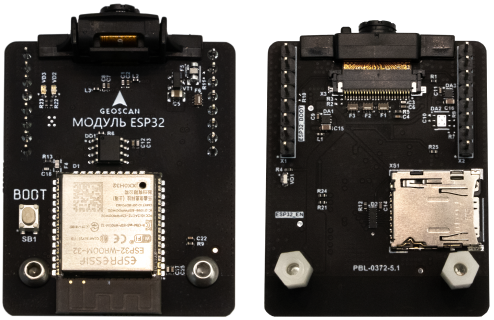
Модуль esp32
Расширяет возможности квадрокоптера позволяя программировать на Python, а также управлять с помощью мобильного приложении Jump. Подключение выполняется в передней части платы-адаптера.
Оглавление
Обновление прошивки модуля esp32
Проверка на необходимость обновления
Подайте питание на плату автопилота через кабель USB или аккумулятор, проверьте Wi-Fi сеть:
- Если Wi-Fi сеть с именем
Pioneerобнаружена - выполнять обновление не требуется. - Если Wi-Fi сеть с именем
Pioneerне обнаружена - переходите к следующему шагу.
Подготовка к обновлению
Скачайте и установите программу Njet_GUI.
Запуск Njet_GUI
Запустите программу, обратите внимание, что конфигуратор Pioneer Station должен быть закрыт.
Настройка параметров обновления
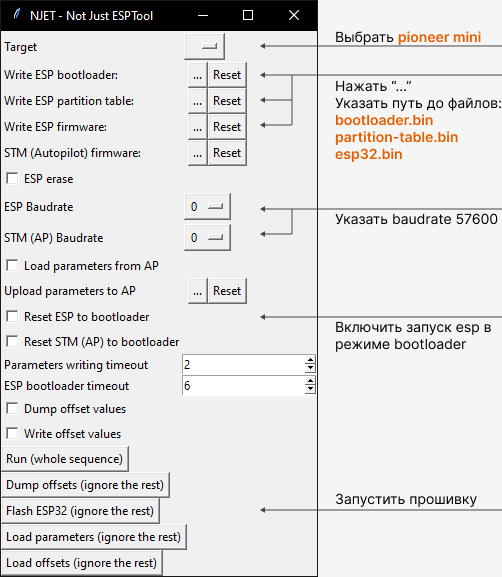
Выберите вкладку Expert Mode и задайте настройки.
| Настройка Njet | Задать значение |
|---|---|
| Target | -> pioneer_mini |
| Write ESP bootloader | -> bootloader.bin |
| Write ESP partition table | -> partition-table.bin |
| Write ESP firmware | -> firmware.bin |
| ESP Baudrate | -> 57600 |
| STM (AP) Baudrate | -> 57600 |
| Reset ESP to bootloader | -> ☑ |
Процесс обновления прошивки
Запустите обновление прошивки нажав Flash ESP32 и дождитесь сообщения:
Leaving...
Staying in bootloader.
finished, returned NoneПодключение к модулю esp32
Физическое подключение
Подключите модуль esp32 к плате-адаптеру, не забудьте соединить плату автопилота и плату-адаптер шлейфами 10 и 12 pin.
Виртуальное подключение
Подайте питание на плату автопилота через кабель USB или аккумулятор, проверьте список Wi-Fi сетей, подключитесь к сети с именем Pioneer, пароль 12345678.
Подключение выполнено!
Теперь вы можете программировать на Python или выполнить полет через мобильное приложение Jump.