Сферы применения БАС
Всё о применения беспилотных летательных аппаратов
Логистика
В ХХI веке появились огромные перспективы применения беспилотного летающего аппарата для гражданских целей и многие страны мира активно занимаются разработкой и совершенствованием беспилотного транспорта.
Безусловно одно из наиболее трендовых на сегодня использований беспилотников – это в логистических целях, тем самым создавая новую среду конкуренции автомобильным транспортным компаниям. Здесь преобладают несколько основных направлений: курьерское, для доставки «последней мили», аэротакси для транспортировки людей, и внутрипроизводственное, то есть складские дроны способные считывать штрих-коды с упаковок и проводить технологичную инвентаризацию.
Одним из первых крупных разработчиков «курьерских» беспилотников стал сервис доставки заказов «Prime Air» (рисунок 1) популярного интернет-ритейлера Amazon, для того чтобы ускорить и удешевить доставку, его тестовая работа была анонсирована в декабре 2013 года. По расчетам данный сервис позволяет доставлять товар весом не более 2.27 кг в течении 30 минут, что в 4 раза быстрее действующего самого быстрого способа доставки «Prime Now». Достижение такой скорости доставки беспилотником происходит за счет устранения всех недостатков, которые присущие наземному транспорту. Например, светофоры, пробки и т.д. С логистической схемой «Prime Air» можно ознакомиться на рисунке 2.

Рисунок 1 - Прототип грузового квадрокоптера программы «Amazon Prime Air» [1]
Рисунок 2 – Логистическая схема доставки груза «Amazon Prime Air» [1]
Работа данной схемы достаточно проста. На первом этапе «Make purchase» покупатель совершает онлайн заказ с указанием способа доставки «Prime Air». На втором этапе «Amazon staff would pack the item into a box» сотрудниками логистического центра выбранный клиентом товар упаковывается и готовится к транспортировке. На третьем этапе «The box would then be transferred to a drone» подготовленный товар загружается в специальный транспортировочный бокс. На финальном четвертом этапе «If would fly directly to the designated location and drop the box off all within 30 minutes or less» беспилотник в течении 30 минут и меньше летит по указанному в доставке адресу, совершает посадку, производит выгрузку товара и возвращается обратно, только после этого клиент забирает товар с места выгрузки.
Первую тестовую, коммерческую доставку (ТВ-приставку и пачку попкорна) с использованием беспилотника компания провела в Великобритании в декабре 2016 года. Двое англичан проживающих в Кебридже вблизи экспериментального «дронодрома» смогли воспользоваться услугой данного сервиса. Вес груза составлял 2.1 кг и благополучно был доставлен через 13 минут после оформления заказа. Управление полета беспилотника (рисунок 3), от взлета до посадки, как и помещение груза в транспортировочный бокс, велось в автоматическом режиме, а точное место посадки необходимо было обозначать с помощью специального QR-кода [2].
Рисунок 3 – Прототип грузового квадрокоптера программы «Amazon Prime Air» [1]

Рисунок 4 – Гибридный дрон программы «Amazon Prime Air» [1]
В проекте, кроме ранее представленных беспилотников на рисунке 1 и 3, использовался еще один аппарат (рисунок 4) гибридной конструкции весом в 25 кг и дальностью полета около 24 километров. При полете дрон поднимается на высоту до 122 метров — в соответствии с ограничениями FAA [1] и ранее предложенной представителями Amazon концепцией разделения воздушного пространства для малых беспилотников на зоны для высокоскоростных коммерческих полетов и локальных полетов технических и частных беспилотников [3].
Гибридная модель, представленная в ноябре 2015 года, подразумевает собой сочетание конструкции вертолета и самолета, что позволило дрону совершать перелеты на дальние расстояния и при этом осуществлять вертикальные взлеты и посадку, что крайне необходимо для доставки груза в условиях плотности и высоты застроек.
Следующей компанией отдающий серьезный приоритет в этой области является «DHL Express», мировой лидер в области международной логистики и экспресс-доставки. Свои первые тестовые испытания компания начала в 2013 году в Германии, городе Бонн. Проект, получивший название «Parcelcopter», что можно перевести с русского языка как «посылколет», в течении недели переправлял грузы через реку Рейн (рисунок 5). На одном берегу располагалась стартовая площадка, где к беспилотнику прикреплялся груз, а на другом, рядом со штаб-квартирой DHL, находилась точка сброса груза. Расстояние, которое преодолевал беспилотник «Parcelcopter» для доставки груза составляло 1 км.

Рисунок 5 - Тестовый полет компании DHL «Parcelcopter»

Рисунок 6 – Транспортировка медикаментов беспилотником «Parcelcopter 2.0» [4]
Спустя год, осенью 2014 года летные испытания возобновились, где главной задачей являлось в течении 3-х месяцев совершать транспортировку медикаментов и предметов первой необходимости из города Норддайх на остров Йюст, Германия (рисунок 6).
Маршрут полетов предполагал полет над Северным морем и имел протяженность в 12 километров, что гораздо больше, чем при первых испытаниях. Экспериментальная схема транспортировки выглядела следующим образом: медицинские сотрудники с острова Йюст делали заказ лекарств, после они доставлялись в точку запуска беспилотника «Parcelcopter 2.0» (рисунок 7) в районе северного побережья города Норддайх, затем в автономном режиме дрон летел на остров и совершал посадку. Лекарства выгружались и доставлялись заказчику. Как и ожидалось, по итогам летных испытаний было получено положительное заключение [5].
Следующий этап тестовых испытаний дрона третьего поколения состоялся с января по март 2016 года, где была выбрана территориальная зона с некоторыми усложненными климатическими условиями - Баварские Альпы, Германия. Полеты усложнялись еще тем, что помимо расстояния в 8.3 километра (рисунок 8), между местом отправки и местом доставки наблюдался перепад высот в 500 метров [6].

Рисунок 7 – «Parcelcopter 2.0» [5]»
Рисунок 8 – Транспортировка груза беспилотником «Parcelcopter 3.0» [4]
В ходе испытаний в горном поселке установили автоматизированную почтовую станцию (рисунок 9) для дронов – «DHL Packstation with SkyPort». Клиент приносит свою посылку на станцию, устанавливает ее в специальный бокс, внутренняя автоматика (рисунок 10) транспортирует ее к беспилотнику, после чего крыша почтовой станции открывается и дрон отправляется в точку расположения следующей автоматизированной станции, но уже для доставки груза.
Стоит отметить, что третья модель компании DHL напоминают аналогичную, гибридную модель «Amazon Prime Air» рассмотренную выше, которая способна взлетать вертикально, как вертолет и перемещаться горизонтально, как самолет. Третья версия проекта летает почти в два раза быстрее предыдущей модели и достигает 70 км/ч. За два месяца тестов «Parcelcopter» доставил 130 посылок из баварских Альп, летая на высоте более 1000 метров над уровнем моря.



Внутрипроизводственное применение
Следующим направлением в логистике является внутрипроизводственное применение дронов, которые способны кардинальным способом его изменить. Под внутрипроизводственным применением в первую очередь необходимо рассматривать инвентаризацию складских помещений - достаточно трудоемкий, занимающий продолжительное время и имеющий ограничение по точности. процесс, но ценная деловая деятельность теперь может выполнятся воздушно, интеллектуально и автономно.
Выглядит сейчас он не совсем так, как раньше, когда сотрудникам складских помещений приходилось записывать в тетради все имеющиеся позиции. На смену этим тетрадям пришли QR-коды, штрих-коды и RFID [2], которые в значительной степени помогли ускорить этот процесс.
Одна из технологий использования профессиональных дронов, которую теперь могут внедрить специалисты по инвентаризации называется «FlytWare» (рисунок 11).

Рисунок 11 – Смеха работы технологии инвентаризации складских помещений «FlytWare» [7]
FlytWare, включает в себя интеллектуальное программное обеспечение, готовое оборудование (камеры, сканеры, датчики) для автоматического считывания штрих-кодов, QR-кодов, беспилотным летательным аппаратом, облачную связь, возможность удаленного управления парками дронов и поддержку всего основного оборудования дронов, для безопасной и экономически эффективной автоматизации учета запасов на складах, в распределительных центрах и тд. Команда разработчиков проекта, решив главные проблемы автономной навигации, то есть среда лишенная GPS, для ориентации двух и более дронов посредством методов компьютерного зрения и машинного обучения, перешла к коммерческому решению [7].
Нельзя не отметить и успехи в данном направлении немецкой компании Linde Material Handling (Linde MH) являющейся одним из ведущих мировых лидеров в производстве гидравлических комплектующих для строительной, складской, сельскохозяйственной и лесозаготовительной техники. На крупнейшей, ежегодной выставке внутренней логистики в Штутгарте в 2017 году, компания представила прототип дрона «Flybox» для инвентаризационных работ на складах.
Гексакоптер (шести-винтовая система), оснащен камерой, дальномером и устройство для считывания штрих-кодов (рисунок 12).

Рисунок 12 – Дрон «Flybox» в процессе инвентаризации [8]

Рисунок 13 – Объединение дрона и роботизированного погрузчика в единую систему [8]
С помощью данного технического решения специалисты решили сразу две актуальные проблемы в использовании дронов на складах: во-первых, бесперебойное электропитание (зачастую дроны имею низкую энергоэффективность), во-вторых, благодаря инновационной системе геонавигации определять местоположения дрона в определенный момент времени без использования GPS.
Беспилотник, поднимаясь вверх вдоль стеллажа, производит фотосъемку каждого паллетоместа и считывает штрих-коды (рисунок 14), складированных товаров. Достигнув, верхней части полки стеллажа он начинает смещаться влево или вправо одновременно с синхронизированным с ним электро-штабелером (погрузчиком) и продолжает процесс инвентаризации сверху вниз.
После он двигается дальше и повторяет волнообразные движения до тех пор, пока все данные о всей стеллажной секции не будут собраны и переданы в компьютерную систему по управлению складом. В дальнейшем эти данные могут быть в любой момент просмотрены в специальном программном обеспечении, отображающем информацию о каждом месте в секции, штрих-коде и фотоматериалах (рисунок 15).

Рисунок 15 – Дрон «Flybox» производит фотосъемку и считывает штрих-коды складированных товаров [8]

Рисунок 16 – Собранные данные отображаются на экране программного обеспечения [8]
Дрон создан для полностью автономной работы и способен осуществлять процесс инвентаризации в не рабочие часы: ночью или по выходным.
Беспилотный транспорт и аэротакси
Весь XX век человечество пыталось воплотить в жизнь идею гибрида автомобиля и самолёта, который позволил бы передвигаться и по воздуху, и по улицам города, но только в последние десятилетия технологии достигли необходимого уровня, чтобы действительно создать массовую модель благодаря доступности композитных, конструкционных материалов, повышению удельной мощности двигателей и достижению значительных успехов в области системного, программного и аппаратного обеспечения.
История аэротакси, как массового вида транспорта началась в 2016 году, когда компания Uber опубликовала план проекта Elevate, который представлял собой концепцию работы сервиса «летающих такси». Его основная цель — создать систему пассажирских перевозок по воздуху с помощью тихих и малогабаритных летательных аппаратов, которые будут перемещать между площадками «Uber Skyport» на крышах небоскребов, а вызвать транспорт и пройти на площадку можно будет с помощью приложения на мобильном телефоне.
В 2017 году компания собрала участников, индустрии занимающихся разработками «аэротакси» на первую конференцию по городским воздушным перевозкам. Эти события стали ключевыми для отрасли и стало ясно, что аэротакси – это не мечта, а конкретный план.
Самостоятельно разрабатывать и производить летательные аппараты компания Uber не планировала. Вместо этого она объявила тендер на их разработку и поставку и уже в 2019 году на самой большой в мире ежегодной выставке потребительской электроники (CES) проходящей в Лас-Вегасе свой полномасштабный концепт (рисунок 16) для Uber представила американская компания «Bell Helicopter».
Название транспортное средство получило «Bell Nexus», имеющее гибридную конструкцию с поворотными винтами разработанная французской компанией Safran Helicopter Engines. Для работы аппарата используется два вида источника энергии: бортовые аккумуляторы и газовая турбина. Гибридная, а не чисто электрическая система движения была выбрана для того, чтобы увеличить грузоподъемность и запас хода аэротакси. Получаемая тяга, равномерно распределяется между шестью моторами (рисунок 17), приводящими в движение винты, которые обеспечивают вертикальный взлет и посадку, скорость и контроль баланса в полете. Стоит отметить, что возможность вертикального набора высоты станет жизненно необходимым условием в ограниченном городском пространстве.
По своим размерам «Bell Nexus» вписывается в размеры вертолетной площадки размерами 11х11 метров. Планируется, что пятиместное аэротакси будет летать на расстояние до 240 километров, преодолевая его за один час. Полный взлетный вес машины может составить около 2720 кг, с грузоподъемностью - от 360 до 450 килограмм.

Рисунок 17 – Концепт аэротакси «Bell Nexus» [9]
Рисунок 18 – «Bell Nexus» на взлетно-посадочной площадке небоскреба [10]
В 2020 году в Мельбурне появится тестовая линия беспилотных аэротакси UberAIR, которая свяжет аэропорт и один из городских торговых центров. Всего тесты пройдут в трёх городах, включая Лос-Анджелес и Даллас, а в 2023 году Uber планирует запустить коммерческие полёты.
Следующим разработчиком мультикоптерных аэротакси, так же инфраструктуры для них является немецкая компания «Volocopter» ранее (E-volo), производитель электрического воздушного транспорта для перевозки пассажиров и грузов. Первая практическая реализация концепции «Volocopter» была осуществлена, в октябре 2011 году, одноместным прототипом VC1 (рисунок 18), который совершил первый в мире полностью электрический пилотируемый полет. В кресле пилота находился один из разработчиков - физик Thomas Senkel, которому приходилось балансировать на шаре под открытом небе. Мультикоптер продержался в воздухе полторы минуты, после чего благополучно приземлился.

Рисунок 19 – испытания мультикоптера «VC1» компании «Volocopter»

Рисунок 20 – «Volocopter VC200» [11]
Двухместное аэротакси VC200 оснащено 18 отдельными электродвигателями (роторами), достигает скорости в 50 км/ч и рассчитан на расстояние от 25 до 30 км. Питание роторы получают от литиевых аккумуляторных батарей, заряд которых составляет около 30 минут. «Volocopter» изготовлен из легких композитных материалов и углеродного волокна. Пропеллеры расположены тройками в каждом из шести блоков. Пустой мультикоптер весит 290 килограмм и может принимать на борт 160 килограмм, то есть максимальный взлетный вес VC200 составляет 450 килограмм. Аппарат может управляться джойстиком или лететь автономно по заданным контрольным точкам, то есть превратиться в полноценный беспилотник. В качестве средств безопасности мультикоптер оснащен аварийными парашютами.
Официальное разрешение на тестовые полеты аэротакси «Volocopter VC200» от авиационных властей Германии компания получила только в 2016 году. Испытания коптера проходили на одном из немецких аэродромов, а его первым пилотом стал один из основателей компании Александр Цозел (рисунок 20).

Рисунок 21 – Первый тестовый полет «VC200» [11]

Рисунок 21 – Первый тестовый полет «VC200» [11]
Во время тестовых полетов мультикоптер поднялся на высоту 25 м и разогнался до 25 км/ч. Одним из преимуществ разработки был летный механизм (рисунок 21), он спроектирован таким образом, что обеспечивает стабильную работу даже когда часть привода выйдет из строя. Работу автоматики обеспечивает бортовой компьютер, обрабатывающий команды с органов управления и способный без проблем обойтись даже при аварийном отключении нескольких моторов.
На выставке общей авиации «AERO Friedrichshafen» в Германии в 2017 году, компания представила новую серийную модель, пассажирского дрона «Volocopter 2X» (рисунок 22), который был построен на основе прототипа «Volocopter VC200».
Конструкция кольцевой рамы «Volocopter 2X» перешла от своего предшественника, 18 роторов, которые объединены для удобства управления на шесть групп, по три ротора в каждой (рисунок 23). У обновленной версии сохранилось несколько вариантов пилотирования: автономный полет или пилотирование из кабины.

Рисунок 23 – «Volocopter 2X» и «VC200» [12]
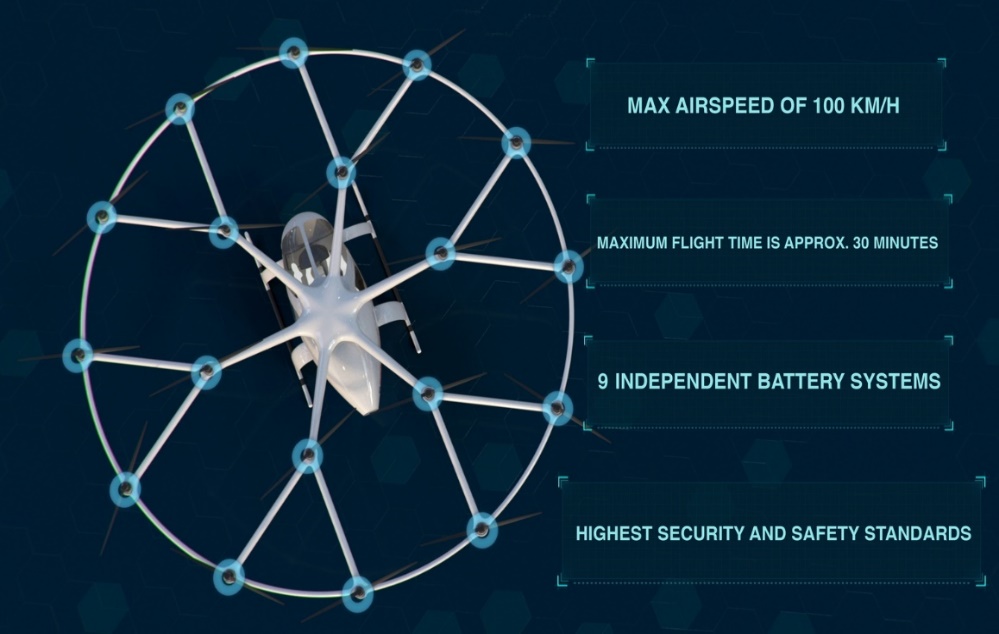
Рисунок 24 – Конструкция кольцевой рамы «Volocopter 2X» [11]
Максимальная воздушная скорость мультикоптера составляет порядка 100 км/ч, высота — 2,15 м, диаметр винтовой системы — 7,35 м, модель оснащена 9 независимыми литиевыми батареями, заряда которого хватает на 30 минут (30 километров пути при крейсерской скорости в 70 км/ч), полное время зарядки батарей менее двух часов, грузоподъемность сохранилась и составляет 450 кг, так же сохранился полноразмерный парашют, для обеспечения повышенной безопасности пассажиров.
В конце августа 2019 года компания представила финальную версию коммерческого аэротакси «Volocity» (рисунок 24), который составит основу перспективного сервиса аэротакси «Volocopter». Летательный аппарат полностью соответствует требованиям Европейского агентства по авиационной безопасности (EASA). «VoloCity» создано на основе первых тестовых моделей, которые выполнили более 1000 испытательных полетов, чтобы инженеры смогли выявить и учесть все слабости и представить финальную модель.

Рисунок 25 – Аэротакси «Volocity» [11]
Конструкция так же сохраняет конфигурацию мультикоптера, перешедшей от модели «Volocopter 2X», но компания улучшила аэродинамику балок, в которых установлены 18 роторов. Была увеличена подъемная сила и усовершенствована устойчивость аппарата в полете. Аэротакси сможет выполнять полеты с максимальной скоростью до 110 км/ч на расстояние до 35 километров и сможет перевозить двух человек с ручной кладью. Варианты пилотирования: автономный и под управлением пилота из кабины. Volocity будет эксплуатироваться со специальных наземных площадок «Voloports», разработка которых осуществляется совместно с британской компанией «Skyports».
Другой известный проект, китайской компании «Beijing Yi-Hang Creation Science & Technology Co», занимающейся разработкой беспилотных летательных аппаратов, пассажирский дрон – «EHang 184» (рисунок 25), который был представлен на выставке CES 2016 в Лас-Вегасе.
Летательный аппарат выполнен по схеме квадрокоптера, имеет четыре луча, четыре пары соосных винтов с восемью электромоторами — по два на каждом луче. «EHang 184» может перевозить одного пассажира на скорости до 100 км/ч. Время полёта — до получаса, за которые можно преодолеть около 16 километров. Принцип управления – автономный. Вес аппарата 200 кг с грузоподъемностью в 100 килограмм. Управление аэротакси осуществляется из единого центра в автоматическом режиме. Внутри кабины нет никаких элементов управления — только сенсорный экран, где пассажир задаёт конечный пункт прибытия и нажимает команду «старт».

Рисунок 26 – Китайский проект аэротакси «EHang-184» [13]

Рисунок 26 – «EHang-216» [13]
2016 год был активным периодом летных испытаний аппарата, разработчики проверяли основные летные системы мультикоптера: работу бортовых электрических систем, маневренность, управляемость и возможность выполнять ночные полеты [14].
В феврале 2018 года компания представила новую модель коптера — «EHang 216». За основу была взята предыдущая модель беспилотника, но теперь у него восемь лучей с 16 электромоторами и 16 пропеллерами вместо восьми (рисунок 26).
Данное конструктивное решение позволило увеличить грузоподъемность аппарата и сделать аэротакси двухместным. Беспилотник также способен непрерывно находиться в воздухе до получаса и преодолевать расстояние в 35 километров, при этом полная зарядка дрона не занимает более двух часов. Аппарат способен подниматься на высоту 500 метров. Тип управления – автономный, с единого центра. Дрон прошел многочисленные испытания в Китае, Австрии и США более 1000 полетов, в том числе в условиях шторма и плохой видимости и налетал порядка 7000 часов (2000 из них – при участии пилотов).
Строительство
Строительная сфера активно применяет новые технологии и инструменты. Беспилотные летательный аппараты не стали исключением, а наоборот стали одним из высокоэффективных коммерческих инструментов, который при мониторинге не нарушает технологические процессы на площадке, управляется дистанционно и способен менять точки обзора, обеспечивает легкий доступ к сложным и высоким структурным элементам, труднодоступным местам. Результаты традиционных наземных наблюдений по многим параметрам уступают данным аэрофотосъемки, полученным с беспилотника: скорость получения, точность, стоимость.
Данные аэрофотосъемки с БПЛА способны предоставлять, картографическую информацию и снимки, которые могут быть использованы для:
- межевания (определение границ) земельных участков;
- инспектирования строений;
- предоставления визуальных материалов для клиентов и сотрудников (фото и видеороликов);
- мониторинга качества выполняемых работ на строительной площадке;
- контроля безопасности;
- картографирования.
Планирование и мониторинг строительных работ является одной из ключевых сфер, где дроны способны значительно улучшить производительность и скорость. На рисунке 29 ниже показаны этапы традиционного подхода к мониторингу и планированию строительства, где строительные чертежи берут за основу для трехмерной информационной модели BIM [3], которая затем используется для задания последовательности строительства и мониторинга процесса.
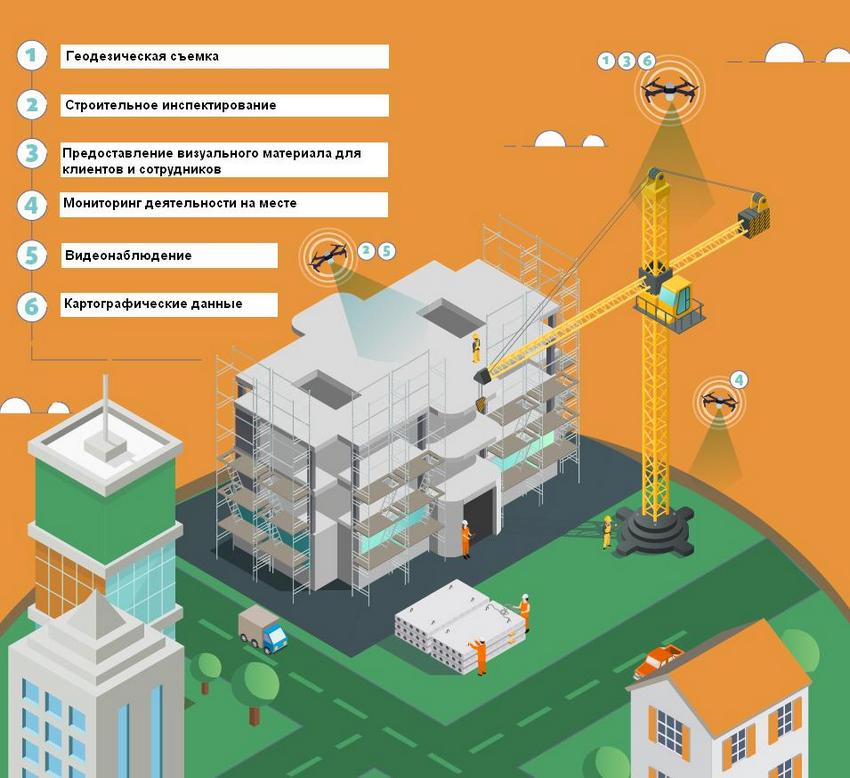
Рисунок 28 – Использование БПЛА на строительной площадке
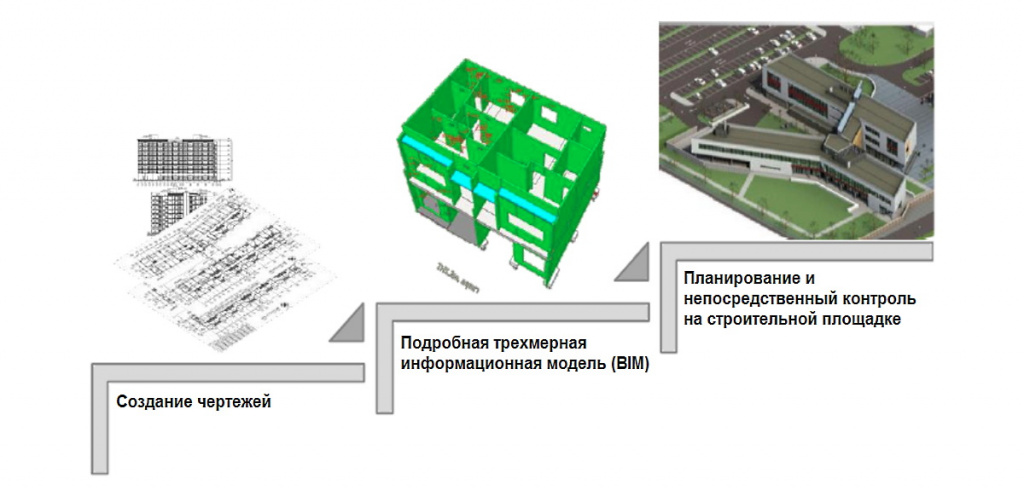
Рисунок 29 – Традиционная схема мониторинга и планирования строительства
При новом подходе данные, относящиеся к аэрофотосъемке с БПЛА из разных мест и облаков точек, могут быть проанализированы и использованы для построения трехмерной модели при помощи методов фотограмметрии. Эта технология позволяет в определенной степени, как бы «оживлять» строительную площадку, значительно расширяя возможности принятия решений «на ходу» (рисунок 30).
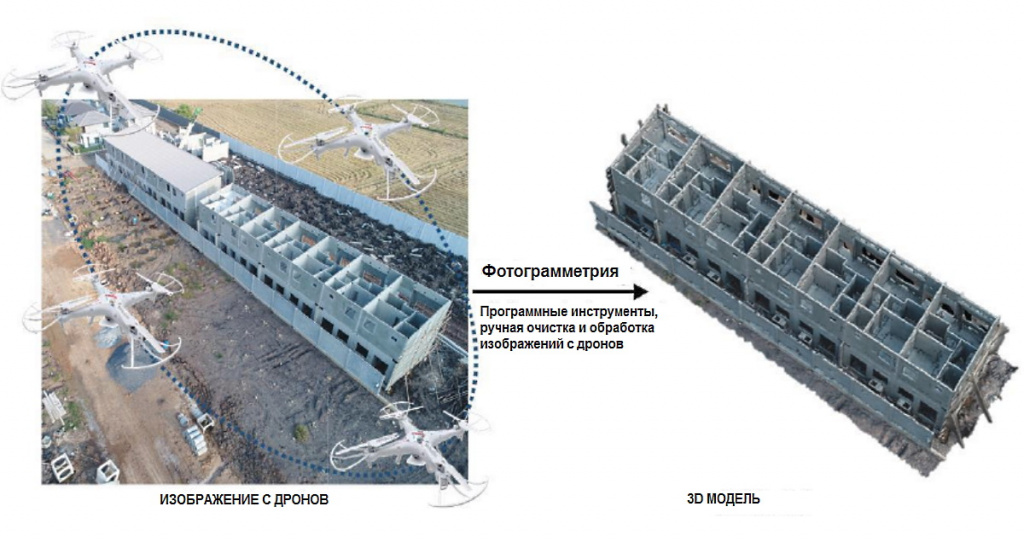
Рисунок 30 – Преобразование данных с БПЛА в трехмерную модель
Полученная трехмерная модель используется для предоставления информации о процессе строительства, помогает следить за количеством материалом, поступающего и покидающего строительную площадку, проводить объемные измерения.
Сельское хозяйство
Процесс управления большим фермерским хозяйством всегда считался непростым видом деятельности. Имея в своем распоряжении необъятные поля, фермеры зачастую просто физически не имеют возможности отследить все изменения, которые происходят с их сельхозугодиями.
Актуальность проблемы контроля за сельскохозяйственными посадками в настоящее время ни у кого не вызывает сомнений. Такие дефекты при посеве, как:
- проплешины;
- гибель урожая после засухи или затопления;
- запыление;
- отсутствие своевременного орошения и удобрения и другие факторы, требуют оперативного контроля.
Площади посевных полей не всегда позволяют это сделать оперативно. Большинство оценок, производимых в таких случаях, делаются наземным путем при помощи выезда на поля экспертной группы, что не является максимально эффективным.
В первую очередь беспилотники используют компании, которые применяют точное земледелие, оно позволяет более эффективно распоряжаться ресурсами, в частности водой и удобрениями, получать актуальную и точную информацию о площади, рельефе, специфике грунта полей, состояние растений и почв, что в свою очередь повышает продуктивность в животноводстве и урожайность на полях. Прошли те времена, когда для аэрофотосъемки достаточно было просто поднять фотоаппарат в воздух. Современные задачи диктуют достаточно жесткие требования как к качеству получаемого фотоматериала, так и к скорости его обработки.
Существующие модели БПЛА, используемые в сельском хозяйстве, представляют собой не просто летательные аппараты, а целый комплекс аппаратных и программных средств, как для обеспечения планирования и контроля полетов, так и для постобработки данных. В первом случае это позволяет оператору составить автономное, полетное задание для более высокой точности получаемых данных, где указывается область, которую необходимо покрыть в процессе аэрофотосъемки, и ряд других телеметрических данных.
Во втором случае результатом аэрофотосъемки являются снимки высокого разрешения на запрограммированных точках по GPS координатам и для каждого снимка получается набор цифровой информации:
- географические координаты центральной точки снимка (может достигать нескольких сантиметров — при использовании геодезического GNSS-приемника);
- высота снимка;
- угол экспонирования;
- телеметрические данные для переноса и использования в общепринятых ГИС системах.
Полученные данные загружаются в специальное программное обеспечение для фотограмметрической обработки данных с последующей визуализацией, анализом и экспортом (рисунок 30).
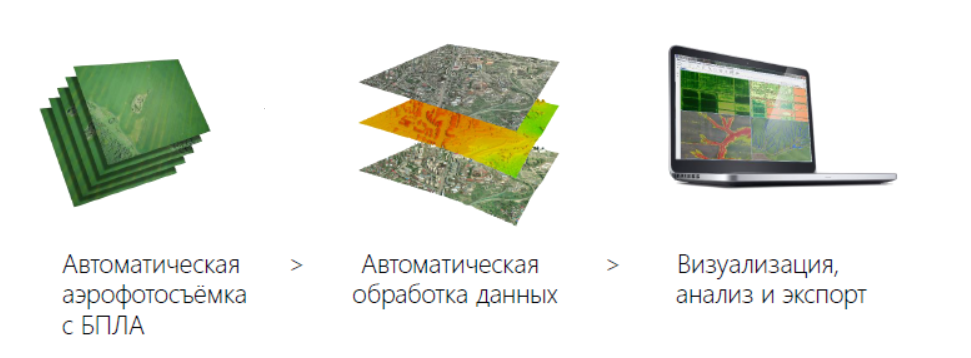
Рисунок 31 – Технология получения и обработки данных
Полученные данные с БПЛА предоставляют возможность:
- создавать электронные карт полей;
- проводить инвентаризацию сельхозугодий;
- оценивать объем работ и контролировать их выполнение;
- вести оперативный мониторинг состояния посевов (БПЛА позволяет быстро и эффективно строить карты по всходам);
- определять индекс NDVI (Normalized Difference Vegetation Index - нормализованный вегетационный индекс);
- оценивать всхожести сельскохозяйственных культур;
- прогнозировать урожайность сельскохозяйственных культур;
- вести экологический мониторинг сельскохозяйственных земель.
Второе направление применения беспилотников в сельском хозяйстве связано с распылением удобрений и средств защиты растений. В 90-х годах прошлого столетия японской компанией «Yamaha Motor Company» был разработан беспилотный летательный аппарат гражданского назначения «Yamaha RMAX» (рисунок 31), конструкция беспилотного воздушного средства выполнена в конфигурации коптера, дрон представляет собой миниатюрный вертолёт длиной в 3 метра и 63 сантиметра с диаметром винта главного ротора в 3 метра 12 сантиметров.

Рисунок 32 – «Yamaha RMAX» в процессе распыления
RMAX - удаленно пилотируемый, разработанный специально для обработки больших по площади сельскохозяйственных посевов. Он весит около 90 кг с полной загрузкой и предназначен для распыления удобрений и химикатов над специальными и высокотоварными культурами. Является экономичной альтернативой опрыскивания с помощью механизированной наземной техники или ранцевых опрыскивателей.
В конце 2015 года китайская компания DJI представила сельскохозяйственный беспилотник. Октокоптер «Agras MG-1» предназначен для обработки выращиваемых культур пестицидами и удобрениями. На складывающихся лучах беспилотника смонтирована система трубок и разбрызгивающих форсунок, а под корпусом находится емкость вместимостью десять литров (рисунок 32).

Рисунок 33 – Сельскохозяйственный октокоптер «Agras MG-1»

Рисунок 34 – «Agras MG-1» в работе
За 10 минут работы октокоптер может опрыскать 4000–6000 м², что в 40-60 раз быстрее, чем операции ручного распыления. Количество пестицидов и удобрений точно регулируется интеллектуальной системой, которая автоматически регулирует распыление в зависимости от скорости полета.
В октябре 2019 года немецкая компания «Volocopter», один из разработчиков коммерческих, перспективных мультикоптерных аэротакси совместно с производителем сельскохозяйственной техники «John Deere» представила беспилотный летательный аппарат «VoloDrone» для сельскохозяйственного применения (рисунок 33).

Рисунок 35 – «VoloDrone» с системой распыления [11]
Как заявлялось в официальном релизе разработчиков [15] поможет повысить эффективность сельхозработ в области обработки растений и полей. Беспилотник оснащен специальными емкостями и распылителем, который регулируются интеллектуальной системой, что позволят дронам распределять пестициды, жидкие удобрения и средства против замерзания равномерно. Зона покрытия составляет до шести гектаров в час.
Квадрокоптер поднимается в воздух при помощи 18 роторов общим диаметров 9,2 м и может летать до 30 минут с грузом порядка 200 кг, может действовать полностью автономно, то есть выполнять набор заложенных предписаний и двигаясь по фиксированному маршруту.
Стоить отметить, что разработка и внедрение беспилотников в данный сектор экономики выглядят очень перспективно. Данная технология в значительной степени повышает точность опрыскивания культур, по сравнению с традиционными наземными способами, позволяет снизить затраты и повысить безопасность работников, так как в момент распыления химикатов и пестицидов, пилот находится на удалении и не подвержен их воздействию.
Электроэнергетика
С появлением беспилотников на рынке экономики, один из ее важнейших сегментов не отказался от внедрения в него беспилотных технологий - электроэнергетика. Несмотря на всю свою прочность и надежность, объектам энергетической инфраструктуры необходимо постоянное внимание и обслуживание. Их эффективная эксплуатация напрямую зависит от актуальности и полноты информации о состоянии электростанций, линий электропередач (ЛЭП) и теплотрасс. Использование традиционных наземных методов обследования инженерных сетей на сегодняшний день уже не самый дешевый и эффективный способ сбора такой информации.
Применение БПЛА дает бесспорное преимущество в:
- Оперативности. Вести обследование инфраструктуры со скоростью в десятки км/ч, или наоборот в режиме зависании над определенным объектом.
- Качестве. В итоге аэрофотосъемки получают материалы высокого разрешения с их геопривязкой.
- Объективности контроля. Постоянное наличие документов, фото и видеоматериалов.
- Безопасности обследования. Снижение вероятности несчастных случае использованием беспилотников.
- Экономике. Снижение стоимости производственных работ. Достаточно двух операторов, которые при необходимости могут обследовать до 200 км ЛЭП в день, что существенно дешевле мониторинга с борта пилотируемого воздушного судна.
Приведенный ряд преимуществ на предприятиях электроэнергетической отрасли дает возможность эффективно и объективно давать оценку технического состояния инфраструктуры.
Рассмотрим основные направления применения БПЛА в электроэнергетике.
- Визуальный осмотр ЛЭП и оперативный поиск отказов: дистанционный мониторинг линий электропередач с БПЛА значительно повышает скорость осмотра по сравнению с наземными обходом опор ЛЭП, особенно если линия расположена в труднодоступных районах. Полеты происходят на безопасном расстоянии от опор и кабелей, не требуют отключения напряжения (рисунок 34, 35).
- Лазерное сканирование (LiDAR): создание высокоточных 3D-моделей местности для контроля «провиса» проводов и мониторинга разрастания растительности в охранной зоне (расчет опасного сближения веток с проводами).
- Тепловизионная диагностика: выявление перегрева контактных соединений и дефектных изоляторов, которые еще не вышли из строя, но уже теряют энергию.
- Тяжение троса-лидера: дрон пролетает над труднодоступными участками (реки, ущелья), протягивая первичный шнур, с помощью которого затем натягивают тяжелые силовые кабели.
- Ультрафиолетовая дефектоскопия: поиск коронных разрядов на изоляторах, которые не видны в обычном или тепловом спектре, но указывают на скорое разрушение изоляции.
- Контроль состояния солнечных панелей и ветряных генераторов: автоматизированный пролет над солнечными фермами для обнаружения «горячих точек» (неисправных ячеек), снижающих КПД всей станции.
Фото и видео съемка для визуального осмотра ЛЭП и оперативного поиска отказов может быть дополнена видеосъемкой в тепловизионном спектре. Это вид теплового контроля с использованием тепловизора (оптико-электронного измерительного прибора, который работает в инфракрасной области электромагнитного спектра). Он обеспечивает переход теплового излучения всех исследуемых объектов в видимую область и позволяет определить наличие дефектов. Электроэнергетика является одной из областей наиболее успешного применения тепловизионной съемки, поскольку обнаруживаемые температурные градиенты могут достигать десятков градусов, что существенно облегчает их идентификацию на фоне помех.
На детальных снимках в видимом диапазоне (рисунок 35) при увеличении возможно рассмотреть нарушения изоляционного слоя или проявления коррозии. На снимках инфракрасного спектра (рисунок 36) можно обнаружить область градиента температур (участок перегрева), ранее не видимый человеческому глазу, и оперативно ликвидировать нарушение.
Ранее тепловизионная съемка ЛЭП выполнялась либо с борта вертолета, либо наземными бригадами эксплуатационных служб. Использование БПЛА для ИК-съемки несравнимо дешевле пилотируемой авиации и позволяет получить гораздо более детальную и точную информацию чем съемка с земли. Тепловизионная съемка каждой опоры ЛЭП производится при помощи БПЛА мультироторного типа. Видеозапись тепловизионной съемки дополняется фотографиями и видео в видимом спектре, что позволяет лучше идентифицировать объект контроля (дефектные секции фарфоровых изоляторов, контакты закрытых и открытых распределительных устройств).