Пульт РУ FlySky i6S

Настройка пульта радиоуправления
Включите пульт радиоуправления
- Удерживайте две кнопки на лицевой стороне пульта управления до включения экрана.
Снимите блокировку экрана и перейдите в настройки
- Для разблокировки удерживайте иконку 🔒 две секунды.
- Чтобы попасть в меню настроек, нажмите на иконку 🛠.
- Если экран быстро блокируется, то для удобства можно установить время блокировки во вкладке System > Screen lock
Настройка вкладки Function
| Параметр Reverse | Значение |
|---|---|
| Ch2 | Rev |
| Ch4 | Rev |
| Параметр Aux. channels | CH Type | Значение |
|---|---|---|
| Channel 5 | SWx | SwC |
| Channel 6 | SWx | SwD |
| Channel 7 | SWx | SwB |
| Channel 8 | SWx | SwA |
Настройки вкладки System
| Параметр Output Mode | Значение |
|---|---|
| Output | PPM |
| Serial | i-BUS |
| Параметр Sticks Mode | Значение |
|---|---|
| Sticks Mode | M2 |
Настройка пульта завершена
- Не забудьте провести сопряжение пульта радиоуправления и радиоприемника в следующей инструкции.
Сопряжение пульта радиоуправления и радиоприемника
Подключите радиоприемник FS-A8S к плате автопилота "Пионер"
Найдите кнопку "Bind" на радиоприемнике и зажмите ее
- Обратите внимание, что кнопка зажимается в выключенном состоянии.

Подайте питание на плату автопилота через USB или аккумулятор, удерживая кнопку "Bind"
- Обратите внимание, что приемник начнет мигать 2 раза в секунду.
Выполните сопряжение
- Включите пульт управления и перейдите в меню настроек.
- Найдите "RX bind", обратите внимание, что приемник начал мигать 1 раз в секунду.
- Выйдите из "RX bind", обратите внимание, что приемник больше не мигает и светит постоянно.
Сопряжение завершено
- Не забудьте изучить управление в следующей инструкции.
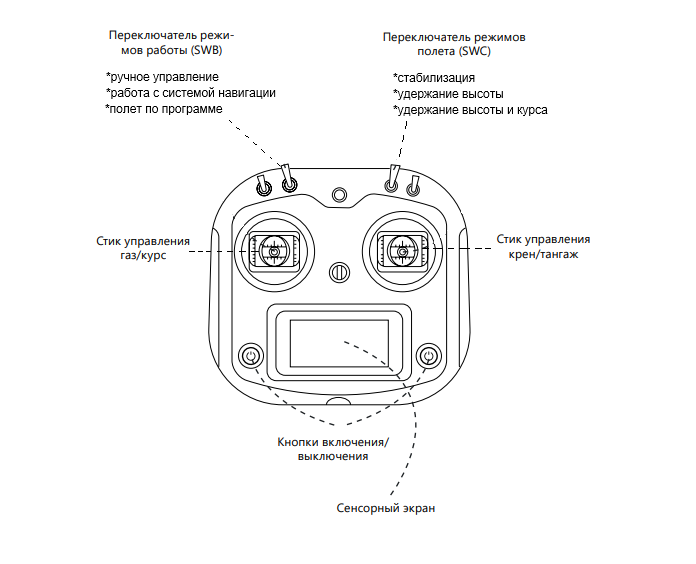
Управление
Управление осуществляется с помощью двух стиков, а переключатели в верхней части отвечают за смену режимов полета и навигации, подробнее о режимах полета и навигации.
Ниже расположены примеры управления квадрокоптером по каждой из его осей.
Режимы управления
Квадрокоптеры серии Пионер поддерживают несколько режимов управления, они помогают осваивать навыки пилотирования, а некоторые можно условно разделить по уровням сложности, например, удержание позиции самый легкий режим, удержание высоты сложнее, а режим горизонтальной стабилизации еще сложнее.
Горизонтальная стабилизация (Stabilize)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
Удержание высоты (AltHold)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
Безголовый режим (Headless)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
- Фиксирует ось X, Y при включение двигателей и не изменяет ее при повороте квадрокоптера.
Удержание позиции (Navigation)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
- Удерживает позицию дрона.
Программируемый (Program)
Подсказка
Барометр используется в случае, если дальномер недоступен, важно понимать, что при использовании дальномера, квадрокоптер будет набирать высоту над расположенными под ним препятствиями, при необходимости можно принудительно перейти на барометр отредактировав параметры автопилота.
Удержание позиции производится с помощью систем навигации.
По умолчанию квадрокоптер откажется выполнять полетное задание, если этот режим неактивен, но при необходимости можно принудительно отключить это требование, отредактировав параметры автопилота.
Таким образом, если в процессе полета вы измените курс(yaw), например, на 180 градусов или иначе говоря развернете квадрокоптер, то при попытке полететь вперед, квадрокоптер полетит не в пилота, а полетит назад, то есть прямо согласно его системе координат.