RadioMaster Pocket
RadioMaster Pocket
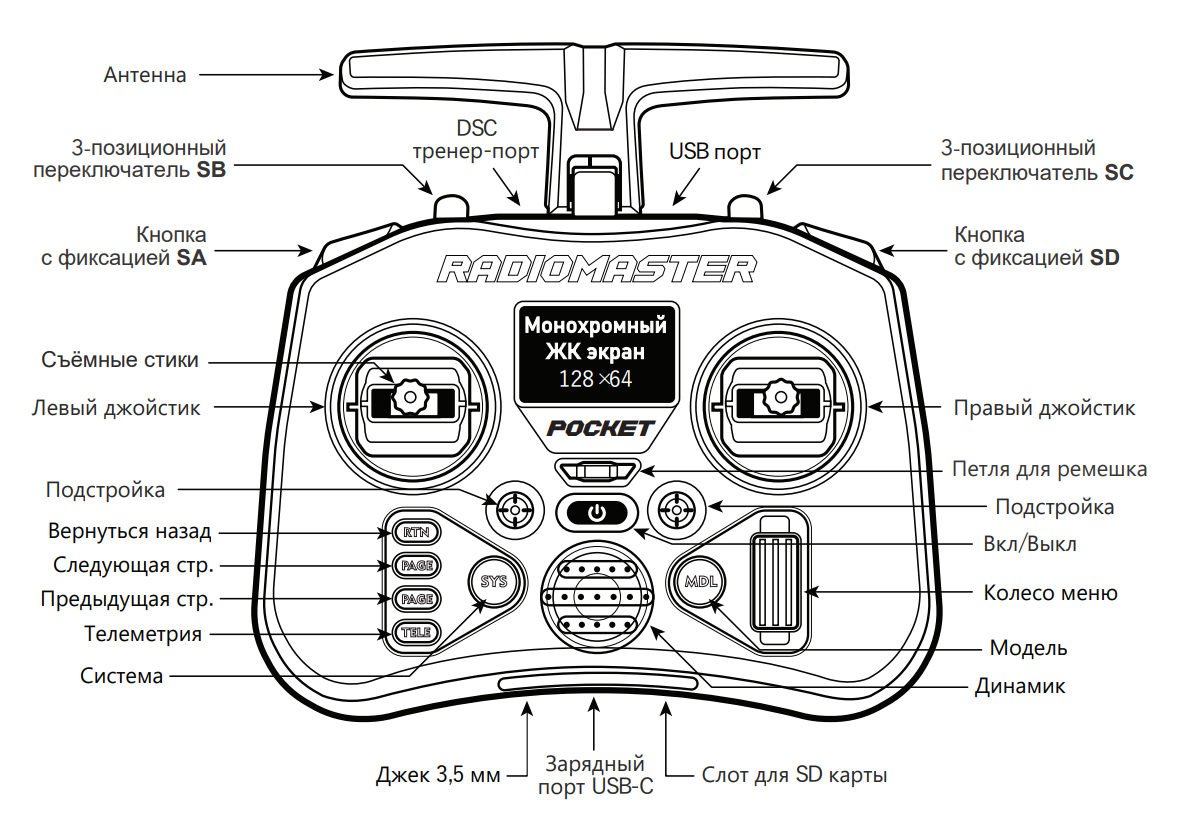
Базовые операции и элементы управления
Заголовок
Технические характеристики
Режимы управления
Квадрокоптеры серии Пионер поддерживают несколько режимов управления, они помогают осваивать навыки пилотирования, а некоторые можно условно разделить по уровням сложности, например, удержание позиции самый легкий режим, удержание высоты сложнее, а режим горизонтальной стабилизации еще сложнее.
Горизонтальная стабилизация (Stabilize)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
Удержание высоты (AltHold)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
Безголовый режим (Headless)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
- Фиксирует ось X, Y при включение двигателей и не изменяет ее при повороте квадрокоптера.
Акро (Acrobatics)
Подсказка
Барометр используется в случае, если дальномер недоступен, важно понимать, что при использовании дальномера, квадрокоптер будет набирать высоту над расположенными под ним препятствиями, при необходимости можно принудительно перейти на барометр отредактировав параметры автопилота.
Удержание позиции производится с помощью систем навигации.
По умолчанию квадрокоптер откажется выполнять полетное задание, если этот режим неактивен, но при необходимости можно принудительно отключить это требование, отредактировав параметры автопилота.
Таким образом, если в процессе полета вы измените курс(yaw), например, на 180 градусов или иначе говоря развернете квадрокоптер, то при попытке полететь вперед, квадрокоптер полетит не в пилота, а полетит назад, то есть прямо согласно его системе координат.