Приложение "Jump"
Установка приложения
- Android RuStore.
- iPhone (приложение удалено из AppStore).
Управление
Управление квадрокоптером Пионер в мобильном приложении - классическое и осуществляется с помощью 2-x стиков. Если ранее вы управляли схожей моделью БВС - у вас не должно возникнуть сложностей. Также если у вас есть Bluetooth-джойстик (является опцией), то советуем изучить раздел по его подключению и настройке.
Управление высотой происходит с помощью перемещения правого стика(газ/курс). При "перемещении" стика вверх квадрокоптер набирает высоту, при перемещении вниз – снижается.
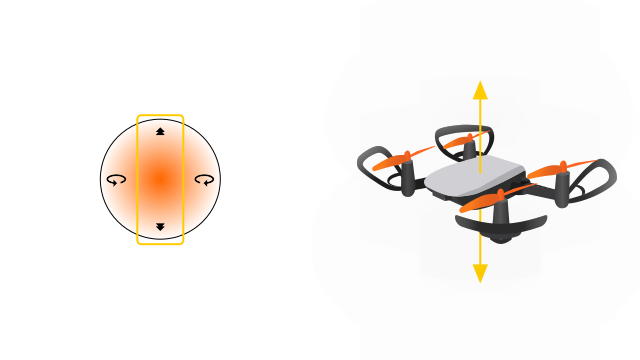
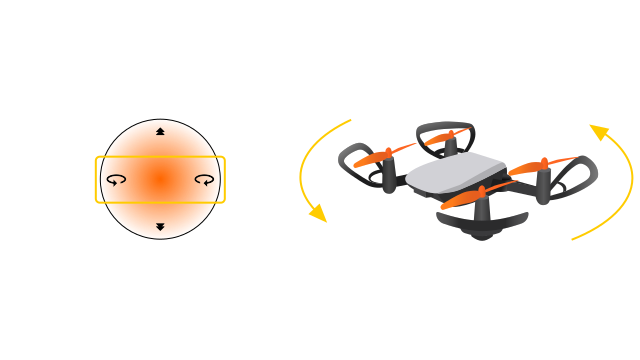
Управление курсом (рысканьем) осуществляется также правым стиком.
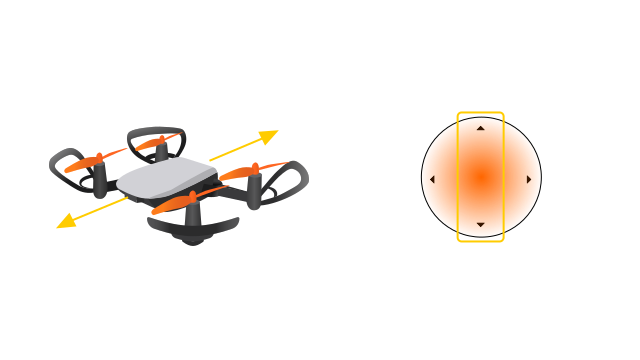
Управление тангажем (полет вперед/назад) происходит при помощи перемещении левого стика. В положении стика от себя, квадрокоптер наклоняется вперед и летит вперед. При перемещении стика крен/тангаж на себя, квадрокоптер наклоняется назад и летит назад.
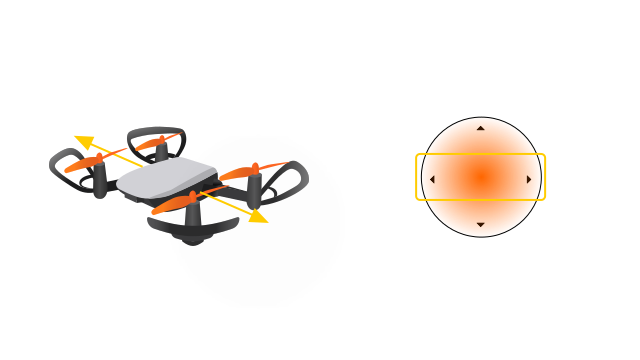
Управление креном (полет влево/вправо) осуществляется также левым стиком. При перемещении стика влево/вправо, квадрокоптер летит боком влево и вправо соответсвенно.
Блочное программирование в приложении Jump
В приложении Jump мы создали визуальную среду программирования для детей и подростков. Она позволяет в простой и доступной форме познакомиться с основными функциями Пионера Мини.
В блочном программировании все возможные движения и действия квадрокоптера представлены в виде перетаскиваемых блоков, которые могут соединяться в программу управления квадрокоптером. Блоки перетаскиваются по технологии drag-and-drop: удерживание нажатия на блоке запускает процесс перетаскивания, а отпускание нажатия заканчивает процесс перетаскивания.
Для перехода в раздел запустите приложение на вашем устройстве и нажмите иконку с блоками в верхнем левом углу.

Интерфейс пользователя
Экран разделён на две части. В левой части экрана представлена палитра всех блоков. Часть из них может не помещаться на экране вашего устройства. В этом случае следует воспользоваться вертикальным тач-скролом для поиска необходимого блока. Правую часть экрана занимает рабочая область, в которой создаётся программа. Также справа находятся кнопки и вспомогательные блоки.
- Кнопка запуска в виде зелёного треугольника служит для старта готовой программы.
- Индикатор работы отображается в процессе выполнения программы.
- Кнопка остановки выполнит экстренную посадку в случае непредвиденных обстоятельств.
- Корзина для удаления ненужных блоков с рабочей области.

Совет
Если вы напишете большую программу, она может не поместиться на экран устройства. Для этого случая предусмотрено масштабирование рабочей области. Чтобы увеличить или уменьшить масштаб, разведите или сведите два пальца на рабочей области.
Описание блоков
Ниже описаны все доступные блоки и выполняемые ими действия.
Название блока | Изображение | Действие |
|---|---|---|
TAKE OFF | Взлёт на высоту 'Take off'. Высота задаётся параметром | |
LAND | Посадка | |
REPEAT |  | Выполняет включённые операции указанное количество раз |
MOVE FORWARD | Движение вперёд. Расстояние указывается в метрах | |
MOVE BACKWARD | Движение назад. Расстояние указывается в метрах | |
MOVE LEFT | Движение влево. Расстояние указывается в метрах | |
MOVE RIGHT | Движение вправо. Расстояние указывается в метрах | |
MOVE UP | Движение вверх. Расстояние указывается в метрах | |
MOVE DOWN | Движение вниз. Расстояние указывается в метрах | |
TURN LEFT | Поворот относительно вертикальной оси (рысканье) влево. В градусах | |
TURN RIGHT | Поворот относительно вертикальной оси (рысканье) вправо. В градусах. | |
SET COLOR | Включение светодиодов. Открывает палитру цветов для выбора. | |
SLEEP | Установка задержки. В секундах | |
TAKE PHOTO | Сделать фотографию. Сохраняется на устройство или SD-карту. |
| Название блока | Изображение | Действие |
|---|---|---|
| 1 | 2 | 3 |
Пример составления программы
Для создания программы необходимо перенести блоки из палитры в рабочую область и выстроить их в необходимом порядке. Блоки автоматически присоединяются в то место, в которое их установили. Таким образом новый блок можно разместить перед, после или между существующих блоков.
Важно
Блоки, отвечающие за передвижение коптера, обязательно должны находиться между блоками взлёта и посадки (Take off и Land)!
В качестве примера рассмотрим небольшую программу полёта по квадрату.

-
Поскольку программа подразумевает полёт, начинаем её с блока TAKE OFF для осуществления взлёта. Маркер рядом с блоками поможет сориентироваться, какое действие выполняется в текущий момент.
-
Открываем цикл и указываем количество повторов.
-
Вносим в блок цикла блоки движения: MOVE FORWARD, MOVE RIGHT, MOVE BACKWARD и MOVE LEFT для движения вперёд, вправо, назад и влево соответственно. Указываем необходимые расстояния в блоках.
-
После указанного количества повторов произойдёт выход из цикла и переход к следующим блокам программы.
-
Завершаем программу блоком LAND для посадки Пионера Мини.
Настройка Bluetooth геймпада
Приложение «Geoscan Jump» позволяет управлять дроном с помощью совместимого bluetooth-геймпада.
Режимы управления
Квадрокоптеры серии Пионер поддерживают несколько режимов управления, они помогают осваивать навыки пилотирования, а некоторые можно условно разделить по уровням сложности, например, удержание позиции самый легкий режим, удержание высоты сложнее, а режим горизонтальной стабилизации еще сложнее.
Горизонтальная стабилизация (Stabilize)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
Удержание высоты (AltHold)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
Безголовый режим (Headless)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
- Фиксирует ось X, Y при включение двигателей и не изменяет ее при повороте квадрокоптера.
Удержание позиции (Navigation)
- Удерживает горизонт квадрокоптера, не позволит перевернуться по крену и тангажу.
- Удерживает текущую высоту ориентируясь на показания дальномера или барометра.
- Удерживает позицию дрона.
Программируемый (Program)
Подсказка
Барометр используется в случае, если дальномер недоступен, важно понимать, что при использовании дальномера, квадрокоптер будет набирать высоту над расположенными под ним препятствиями, при необходимости можно принудительно перейти на барометр отредактировав параметры автопилота.
Удержание позиции производится с помощью систем навигации.
По умолчанию квадрокоптер откажется выполнять полетное задание, если этот режим неактивен, но при необходимости можно принудительно отключить это требование, отредактировав параметры автопилота.
Таким образом, если в процессе полета вы измените курс(yaw), например, на 180 градусов или иначе говоря развернете квадрокоптер, то при попытке полететь вперед, квадрокоптер полетит не в пилота, а полетит назад, то есть прямо согласно его системе координат.